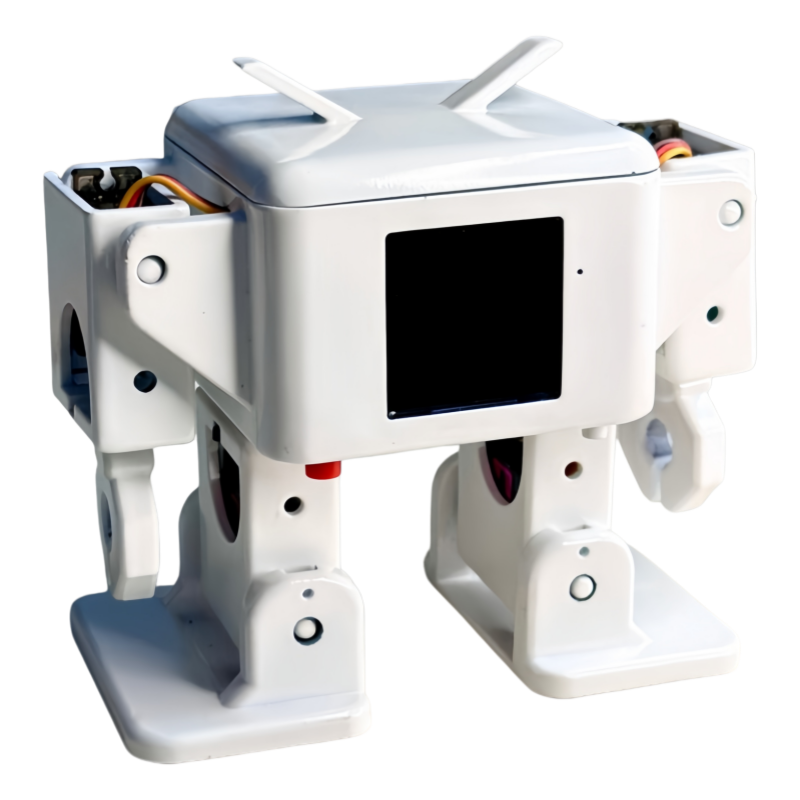
闪猫1号 OttorobotAI版
闪猫1号是一个开源的可自行制作的AI桌面人形机器人,灵感源于2016年 Camilo Parra Palacio 创建的 Otto DIY 项目。闪猫侠研发团队自研端侧算法、外观设计、机械结构,结合3D打印与通用电子元件,让小白用户仅需30分钟、超低成本即可手搓专属桌面AI机器人。
 闪猫1号 OttorobotAI版
闪猫1号 OttorobotAI版通过云端一体架构,闪猫1号具备 AI语音对话、AI动作反馈、AI视觉系统等能力,深度融合情感陪伴、创客教育、3D打印、AI大模型、具身智能、智能家居等多元场景,并支持一键接入闪猫侠AI、小智AI、涂鸦智能、火山引擎等主流AI服务,是AI桌面机器人的智能生态硬件平台。
核心能力一览
闪猫1号同时兼容三套AI服务后端,共享以下核心能力,不同后端各有独家亮点:
| 能力 | 小智 AI | 涂鸦智能 | 闪猫侠 AI(内测) |
|---|---|---|---|
| 联网方式 | Wi-Fi + ML307 Cat.1 4G | Wi-Fi + ML307 Cat.1 4G | Wi-Fi + ML307 Cat.1 4G |
| 唤醒交互 | 语音 / BOOT键唤醒打断 | 语音 / BOOT键唤醒打断 | 语音 / BOOT键唤醒打断 |
| 离线唤醒 | ESP-SR 技术 | ESP-SR 技术 | ESP-SR 技术 |
| 语音对话 | WebSocket / UDP 流式 | WebSocket / UDP 流式 | WebSocket / UDP 流式 |
| 语言识别 | 5种(国粤英日韩) | 5种(国粤英日韩) | 10种+(含俄/西/阿/越/意/乌等) |
| 声纹识别 | 3D Speaker | 3D Speaker | 3D Speaker |
| 语音合成 | 火山引擎 / CosyVoice TTS | 火山引擎 / CosyVoice TTS | 火山引擎 / CosyVoice 等 TTS |
| AI大模型 | Qwen / DeepSeek / Doubao | Qwen / DeepSeek / Doubao | SuperCat LLM2 + Qwen / DeepSeek / Doubao / 文心一言 |
| 记忆 | 短期记忆 | 短期记忆 | 短期 + 长期记忆(可选) |
| 独家亮点 | — | 涂鸦全生态智能家居语音控制 | 更多语言 + 更多大模型 + 长期记忆 |
动作库
机器人拥有丰富的动作库,每个动作完成后自动归位(home),随时接收新指令:
| 类别 | 动作 | 说明 |
|---|---|---|
| 基础移动 | 行走 / 转向 / 跳跃 | 支持方向、步数、速度参数 |
| 特殊动作 | 摇摆 / 太空步 / 弯曲 / 摇腿 / 上下 / 旋风腿 | 支持幅度、速度参数 |
| 手部动作 * | 举手 / 放手 / 挥手 / 大风车 / 起飞 / 健身 / 打招呼 / 害羞 / 广播体操 / 爱的魔力转圈圈 | 需配置手部舵机 |
| 系统动作 | 坐下 / 展示 / 复位 | 无参数,一键触发 |
| 高级功能 | 舵机序列自编程 | 支持普通移动和振荡器两种模式 |
* 手部动作仅在配置手部舵机时可用。所有动作均可通过语音指令或MCP工具调用,详见使用说明。
本站内容导航
快速入门
闪猫侠桌面AI人形机器人分为ESP32版、涂鸦智能版、地瓜版等,本文档以ESP32版为例。开始制作前,了解一下需要准备什么。
你需要知道什么
别担心,这些都可以边做边学:
- 电子基础:简单的电路概念、认识基础元件、用万用表测电压和连通性
- ESP32基础(可选):了解开发板结构、ESP-IDF/Arduino环境、编译上传程序
- 网络与API(若学习源码):Wi-Fi配置、API Key、大模型API使用
- 3D打印(可选):下载STL文件、推荐嘉立创3D打印、喷漆配色
你需要什么工具
- 电脑 + USB Type-C 数据线:编程和烧录
- 螺丝刀套装(小型十字) + 剪线钳/剥线钳
- 万用表:排查故障
- 烙铁套装(需风枪或加热台):自己焊接时需要
- ESP-IDF 开发环境(可选):深度开发用
制作时间
| 阶段 | 耗时 | 说明 |
|---|---|---|
| 准备材料 | 1-5 天 | 网购、PCB制作、3D打印 |
| 电路板焊接 | 2-4 小时 | 可选,套件版无需焊接 |
| 组装硬件 | 1-2 小时 | 按教程组装 |
| 烧录+配网+测试 | 0-2 小时 | 烧录固件、配网、AI功能设置 |
适合谁
- 中级电子爱好者:有 Arduino / ESP32 经验
- AI学习者:对大模型应用感兴趣
- 教育工作者:教AI与硬件结合
- 中学生+:14岁以上,成人指导下可尝试
- 创客与开发者:探索语音交互和AI应用
采购指南
官方店铺(推荐新手)
想自行采购?以下是完整的组件清单和下单指南。
电子组件清单(V1.1)
立创开源项目:oshwhub.com/txp666/ottorobot — 除boot按键外,其余元件可在立创一键下单。
| 组件 | 规格说明 | 购买 |
|---|---|---|
| 主控 | ESP32-S3-WROOM-N16R8(自带/外置天线均可,推荐乐鑫官方模组) | 淘宝 ► |
| 舵机 | SG90 9G舵机180度或SG90s舵机180度(6个,推荐金属齿轮版) | 淘宝 ► |
| 电池 | 103450/2000mAh(备注1.25红黑)或 18650/2200mAh PH2.0(红黑线序) | 淘宝1 ► / 淘宝2 ► |
| 喇叭 | 2828-4R3W-2P1.25 银色 | 淘宝 ► |
| 喇叭驱动 | MAX98357A(非BGA版,模块板可选BGA) | 淘宝 ► |
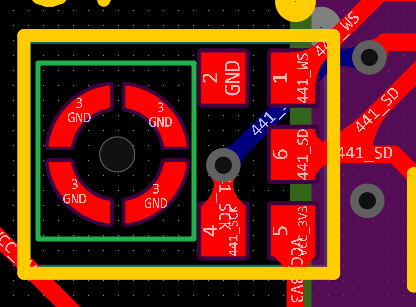
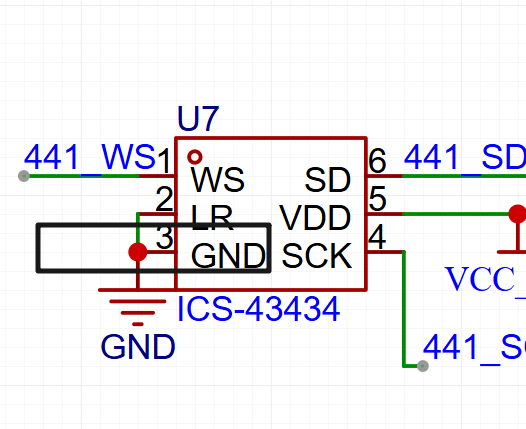
| 麦克风 | ICS-43434(模块版任意,INMP441通用) | 淘宝 ► |
| LCD | 1.54寸 240×240(不要选瀚彩玻璃胶铁一体) | 淘宝 ► |
| 开关 | 5.8×5.8 侧按自锁(可加购按键帽) | 淘宝 ► |
| boot按键 | 笑脸轻触开关贴片 3.3×4.5×6H(按淘宝6mm高度) | 淘宝 ► |
| 舵机排针 | 2.54MM 双排 2×3P(至少3个) | 淘宝 ► |
| 喇叭端子 | 立贴 1.25mm(至少2个) | 淘宝 ► |
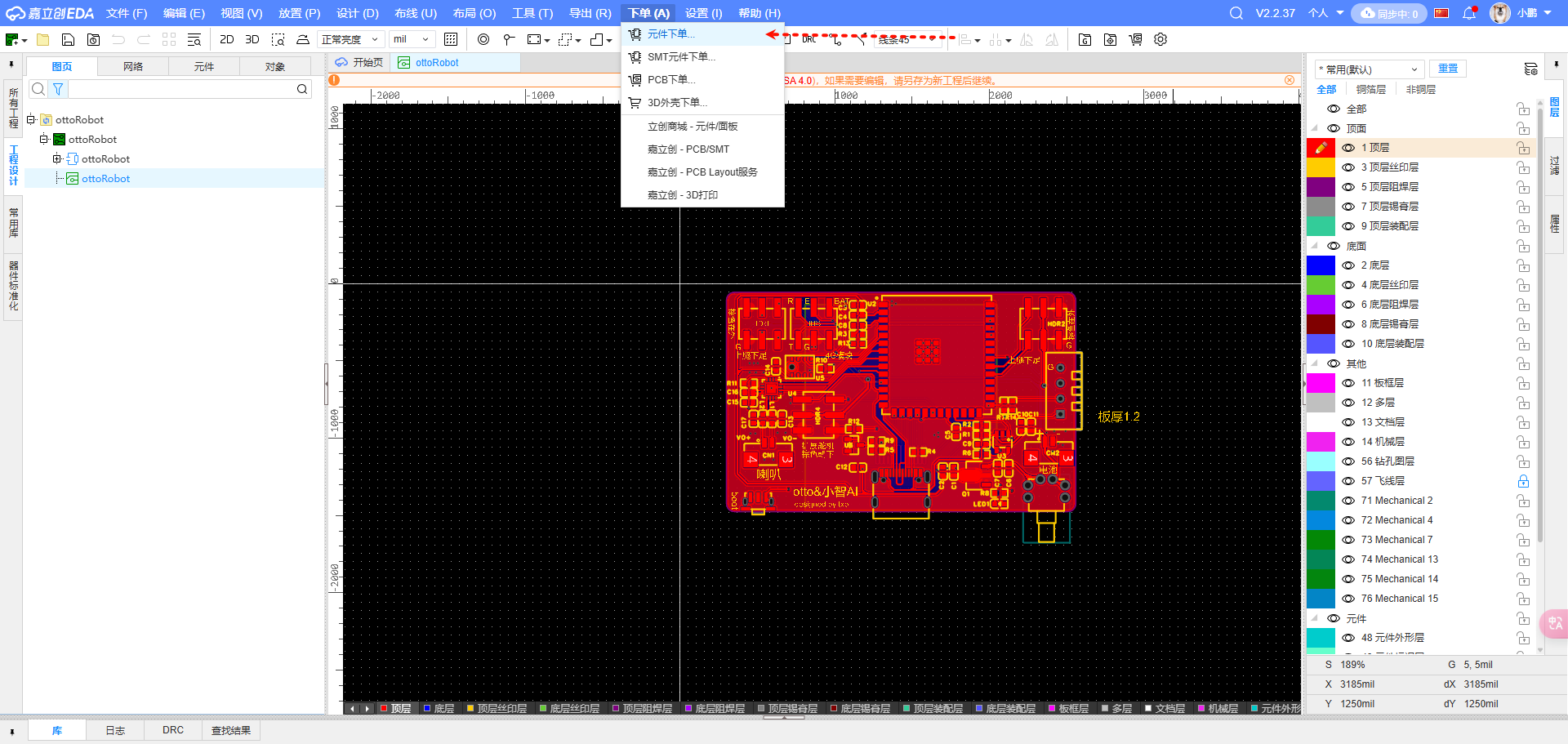
PCB + BOM 下单
1. 访问 立创开源项目 → 2. 登录账号 → 3. 点击"一键下单PCB"
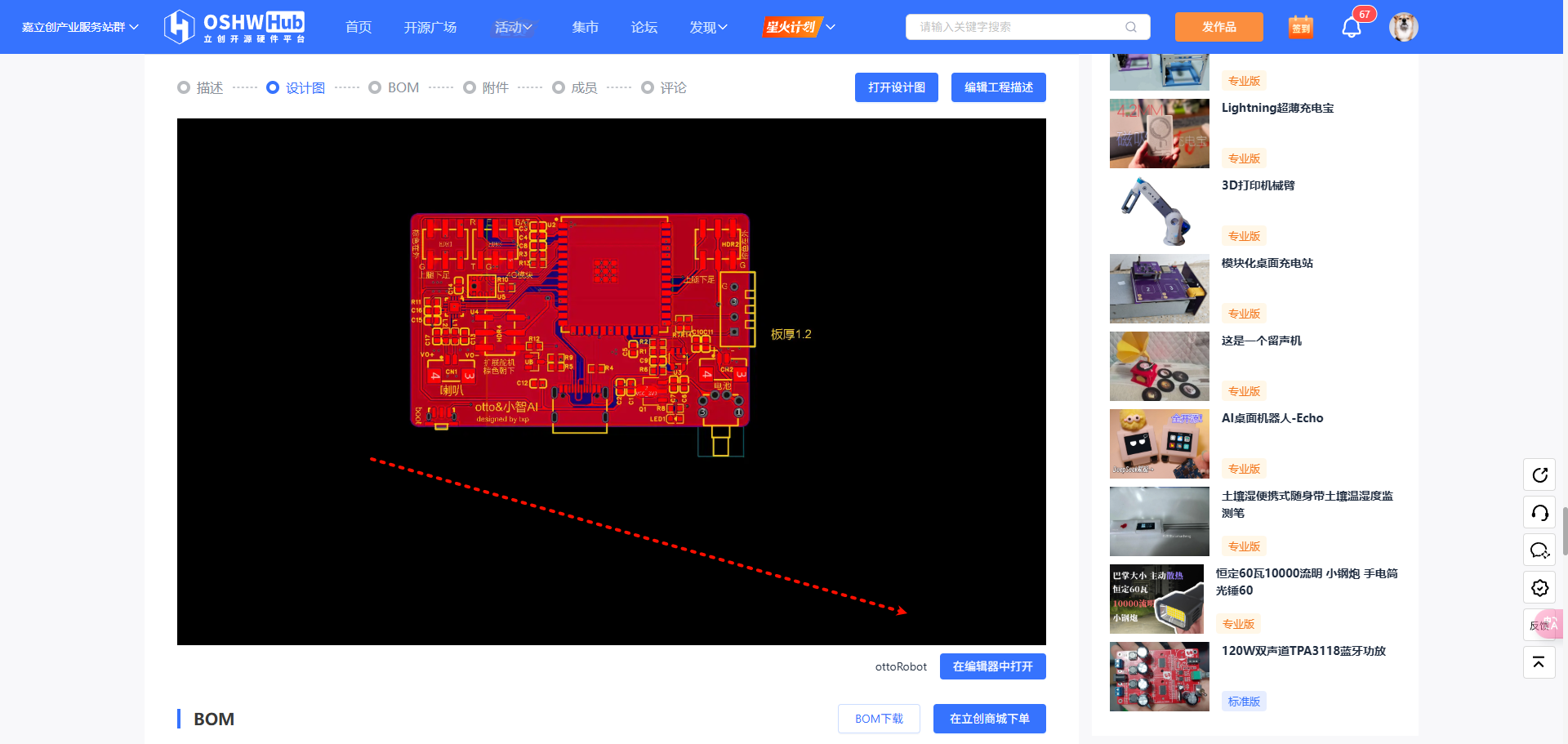 PCB下单步骤1
PCB下单步骤1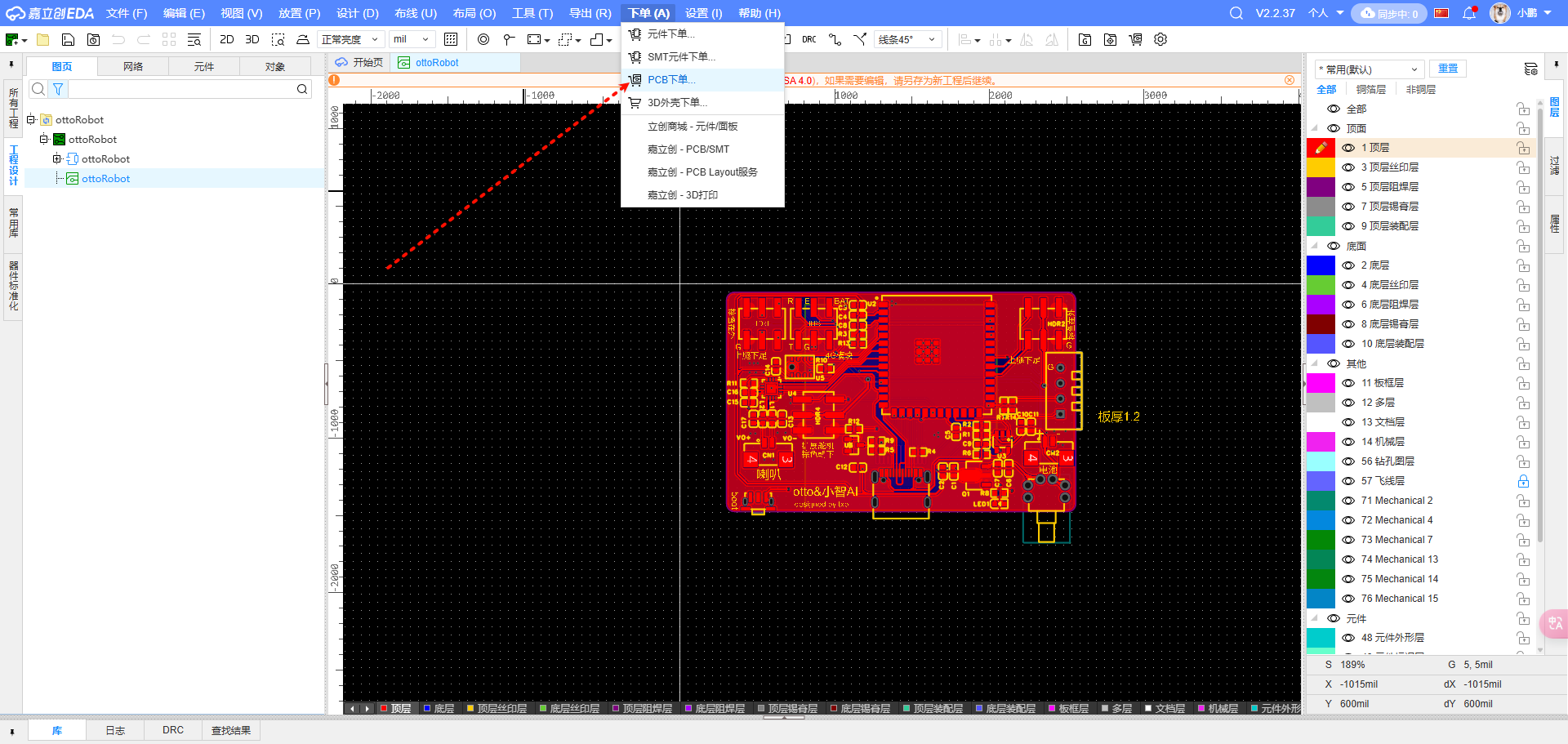 PCB下单步骤2
PCB下单步骤2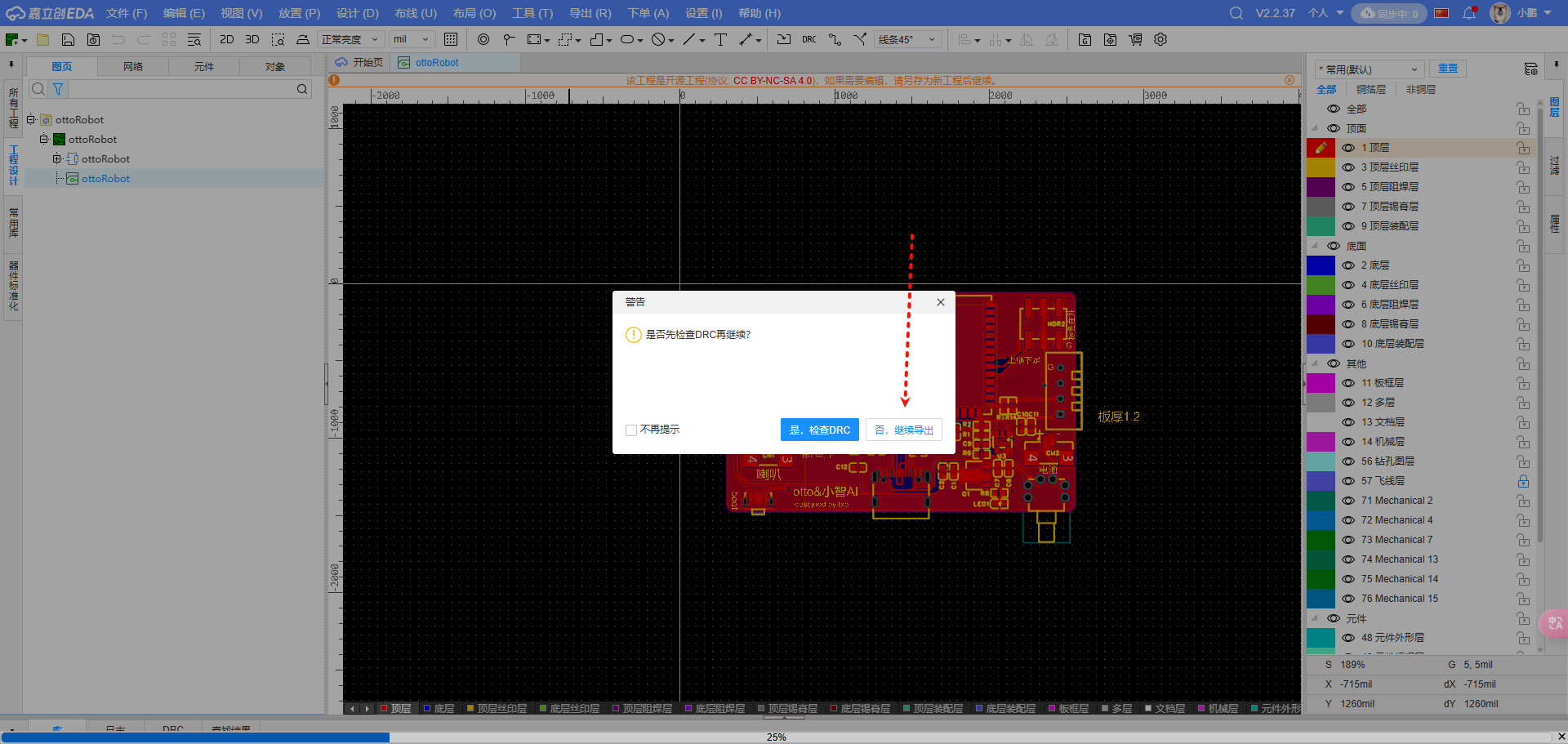 PCB下单步骤3
PCB下单步骤3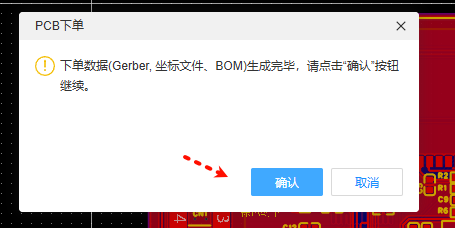 PCB下单步骤4
PCB下单步骤4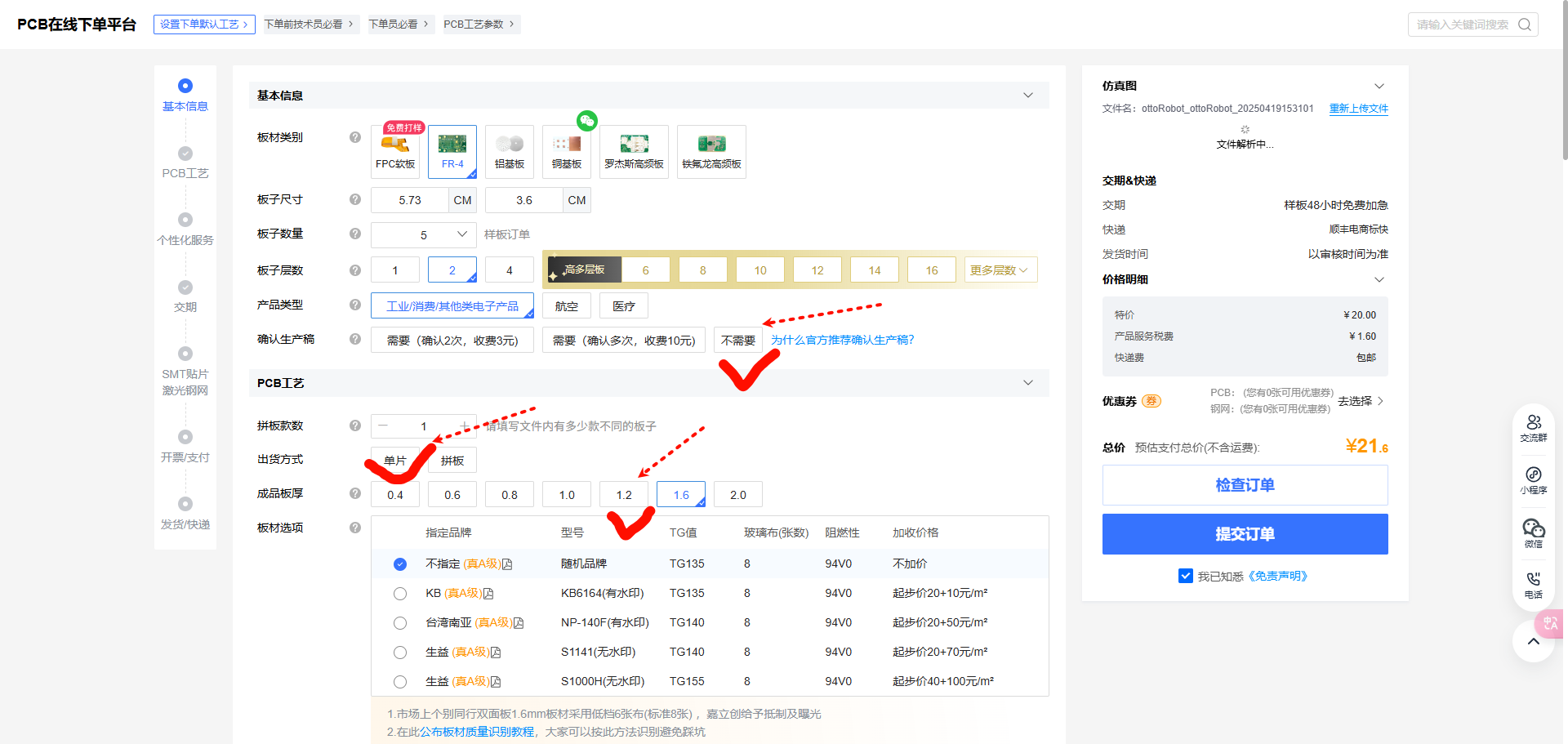 PCB下单步骤5
PCB下单步骤5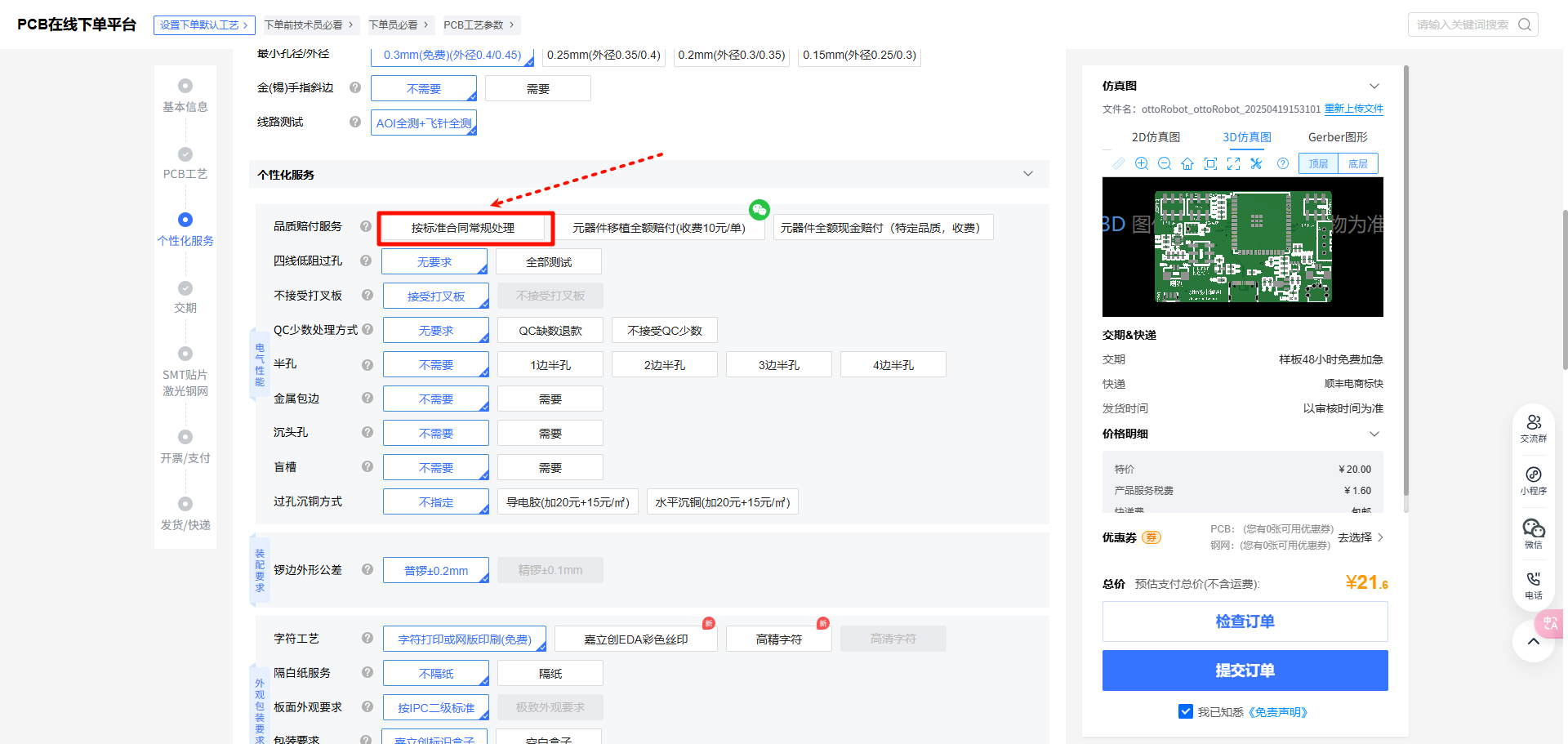 PCB下单步骤6
PCB下单步骤6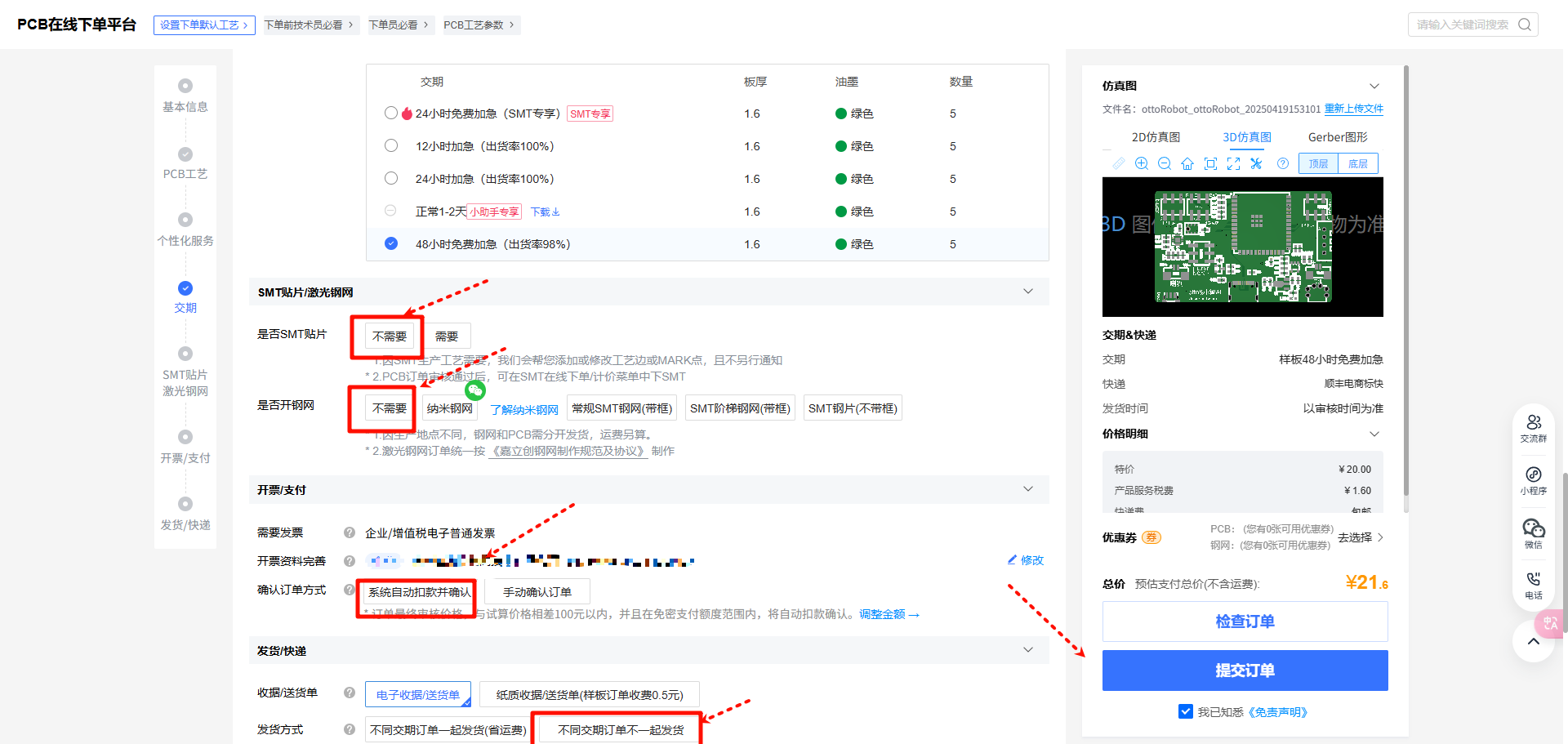 PCB下单步骤7
PCB下单步骤7BOM下单流程:
 BOM下单步骤1
BOM下单步骤1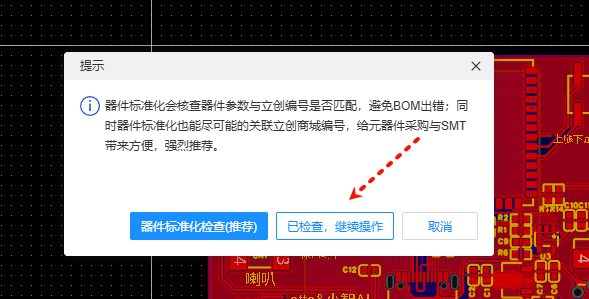 BOM下单步骤2
BOM下单步骤2 BOM下单步骤3
BOM下单步骤3 BOM下单步骤4
BOM下单步骤4 BOM下单步骤5
BOM下单步骤5 BOM下单步骤6
BOM下单步骤63D打印部件
| 部件 | 文件名 | 数量 | 推荐材料 |
|---|---|---|---|
| 身体 | Otto_body | 1 | PLA /树脂 |
| 头部 | Otto_head | 1 | PLA /树脂 |
| 腿部 | Otto_leg | 2(带手版4个) | PLA /树脂 |
| 脚部 | Otto_foot | 2 | PLA /树脂 |
| 手抓 | Otto_grip | 2(仅带手版) | PLA /树脂 |
| 版本 | 日期 | 更新内容 |
|---|---|---|
| v1.3(最新) | 2025-5-15 | 减小leg长度防手臂卡线;body屏幕更好装 |
| v1.2 | 2025-4-26 | 适配2828喇叭+18650电池+手臂优化 |
| v1.1 | 2025-4-16 | 增加head-2828喇叭带天线 |
3D模型下载参考:makerworld.com.cn/@shanmaotech ►
总预算
自行采购总成本约 ¥200-¥500,取决于购买渠道和组件质量。已有部分工具则更低。
焊接指南
如果购买的是套件版则无需焊接,可直接跳到组装教程。
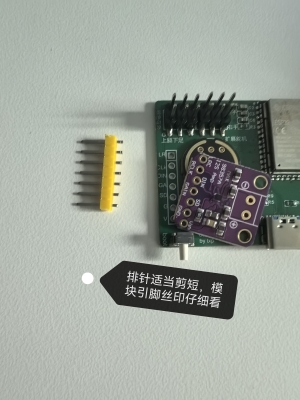
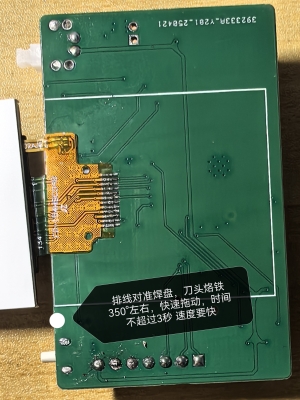
模块板焊接参考



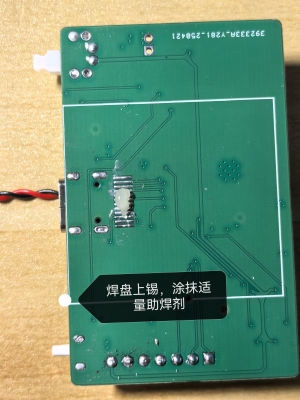
非模块板焊接参考
焊接注意事项
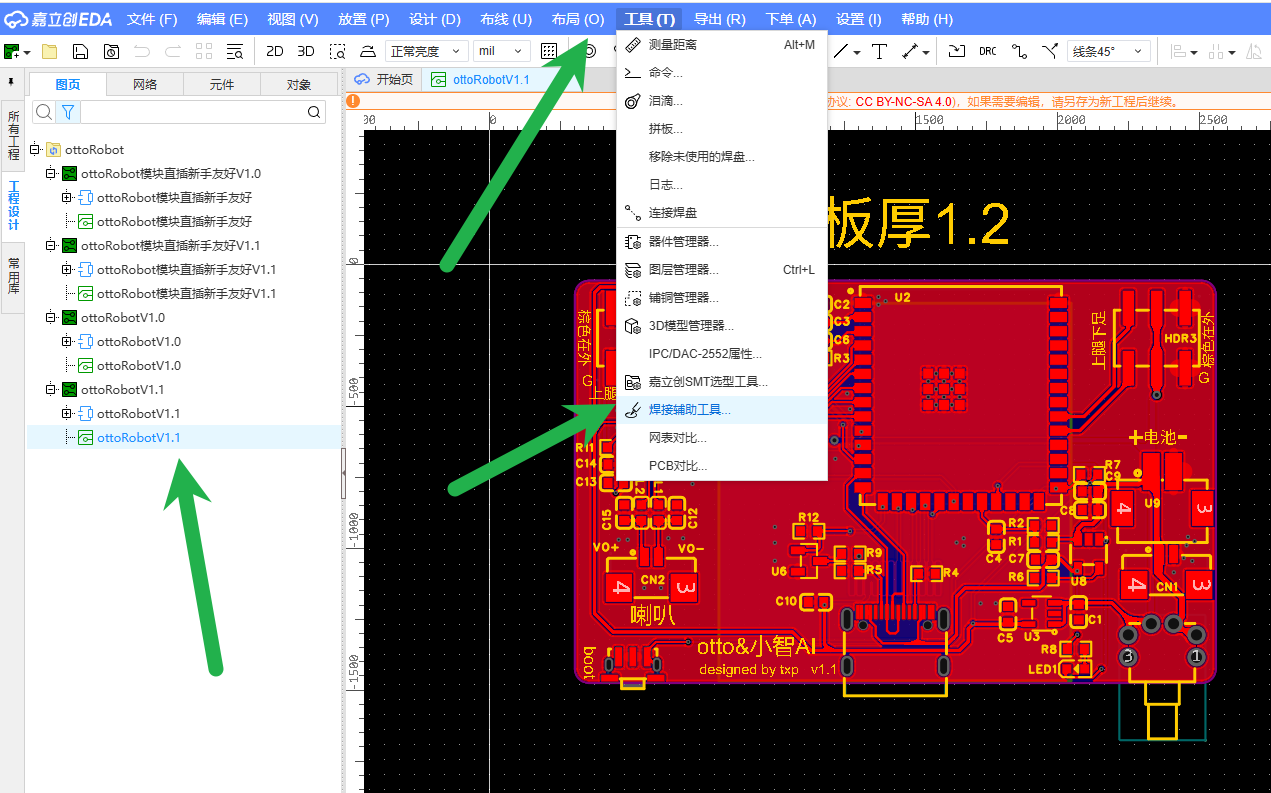 焊接辅助工具
焊接辅助工具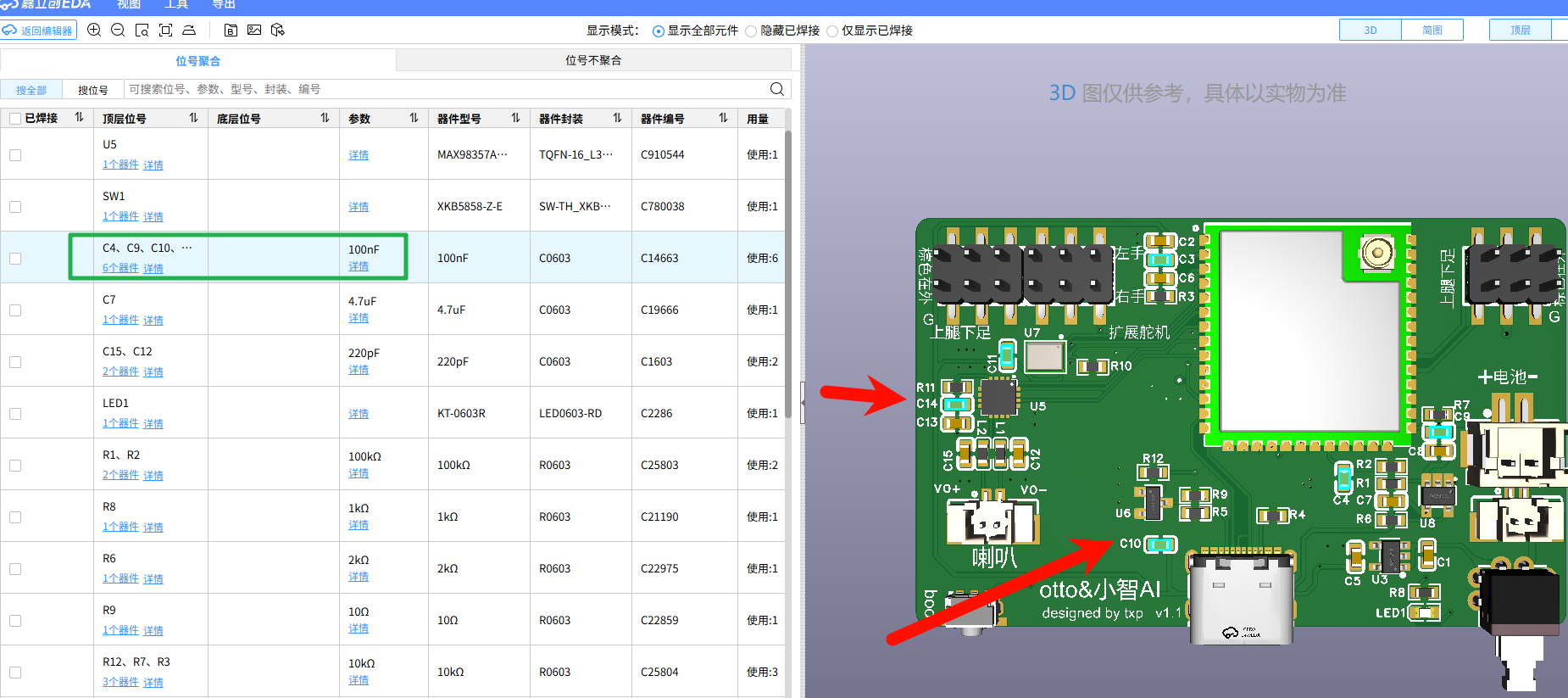 焊接辅助工具
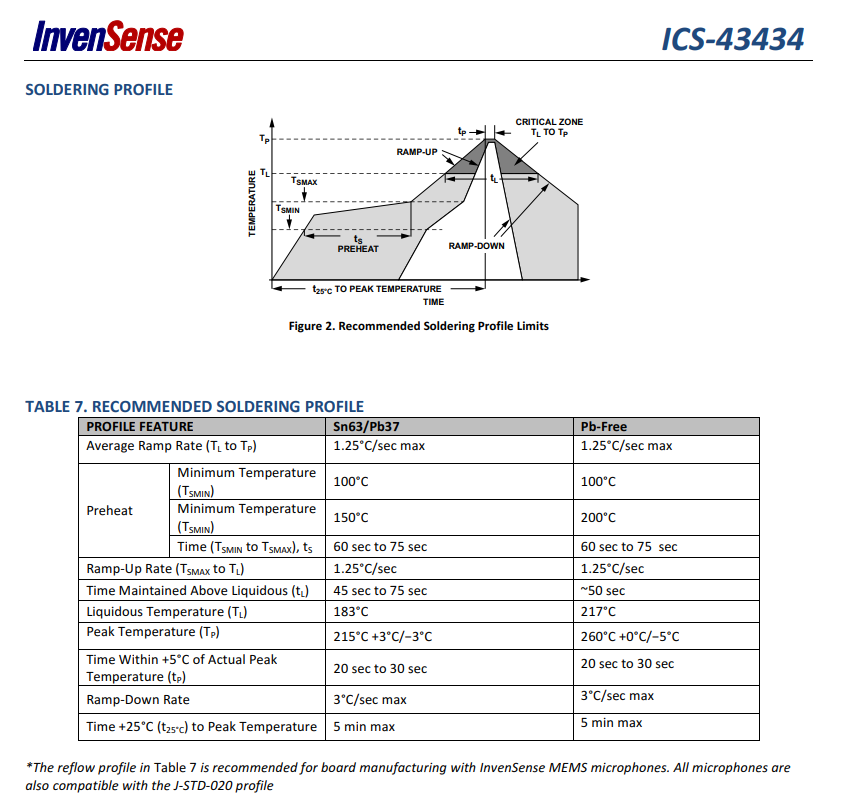
焊接辅助工具- 麦克风:第3引脚GND一圈必须焊好,否则发热不稳定易烧坏。先焊盘上锡,风枪吹化后迅速放上,不要长时间吹。参考焊接温度:
- 功放:注意方向,+号对应右上角白点
- ESP32:底部焊盘涂锡膏,加热台或热风枪吹
- LED:左侧为负极,绿色竖线朝左;充电指示灯,不插电池会微微亮
所需工具
- 恒温烙铁:320-350°C可调
- 焊锡丝:0.8mm有铅焊锡(60/40或63/37)
- 助焊剂 + 吸锡带/吸锡器 + 镊子 + 酒精
- 放大镜/显微镜:检查焊点
- 热风枪(可选):拆卸元件
焊接后检查
- 1. 目视检查:无虚焊、短路
- 2. 万用表:连通性 + 短路检查 + 电压测试
- 3. 酒精清洁PCB上的助焊剂残留
- 4. USB测试:插上USB线,设备是否正常识别
焊接技巧
- 每个焊点加热不超过3-5秒,保持烙铁头清洁
- 45度角接触焊盘和元件引脚,确保同时加热
- 好的焊点光滑有光泽,呈锥形或火山形
- 耐心是关键,不要急于完成
焊接FAQ
组装教程
组装视频
准备工作
- 准备好所有必要的零部件,可以在官网直营店购买全套DIY套件:闪猫科技淘宝直营店 ►(或淘宝搜索"闪猫科技")
- 准备斜口钳、M2螺丝刀
- 干净的工作台
Step 1 — 材料检查
- 检查3D打印件是否完整,清理支撑材料,确保孔位通畅
 所有材料准备
所有材料准备Step 2 — 电子元件安装
- 1. 安装舵机(双排三针→外侧接棕色舵机线(负极),上腿下足)
- 2. 连接喇叭 → 连接电池 → 烧录程序
- 3. 打开开关,舵机初始化到90度(确保齿轮不变,手臂初始向下45度)
- 4. 拆下舵机线,等身体安装完再重新插上
 电子元件安装
电子元件安装Step 3 — 腿部组装
用舵机包内的两个大螺丝固定舵机
 组装腿部舵机
组装腿部舵机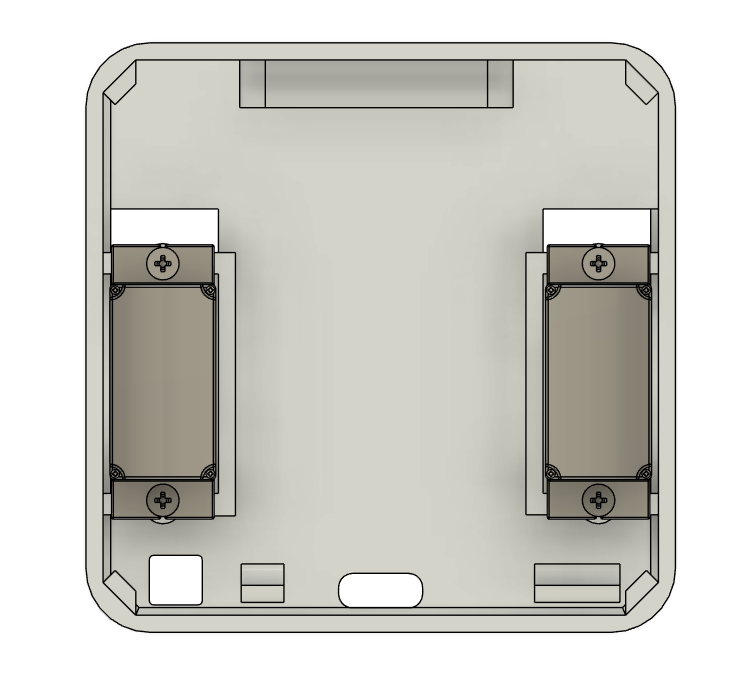 完成腿部舵机组装
完成腿部舵机组装修剪舵机十字摇臂:较长两端剪掉约一半
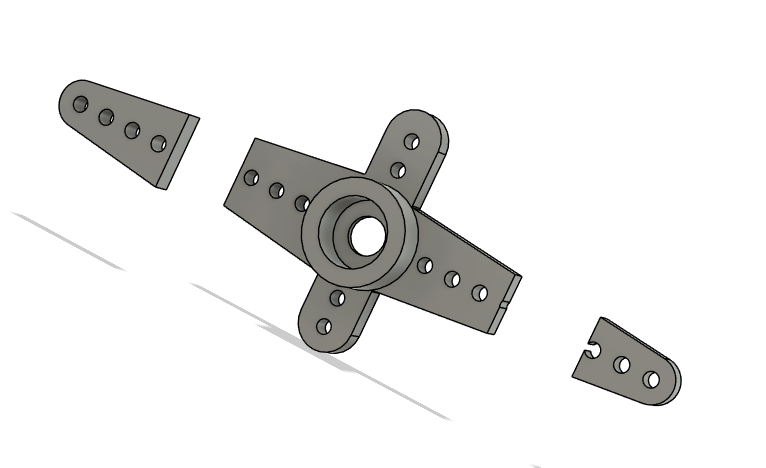 修剪舵机十字摇臂
修剪舵机十字摇臂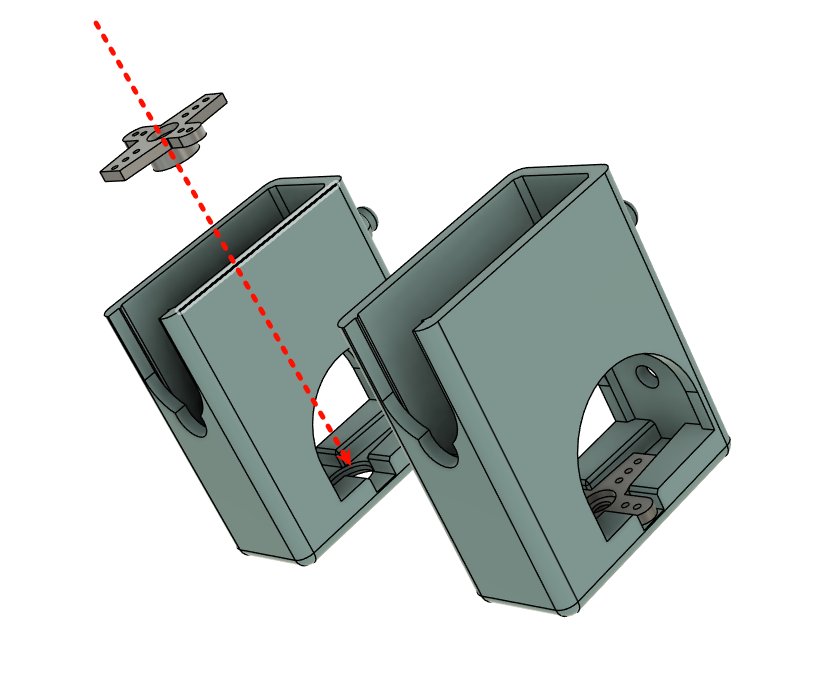 安装十字摇臂到腿部
安装十字摇臂到腿部保持腿部圆柱突起朝向屏幕一侧,腿部垂直朝前(尽量不要内八外八)
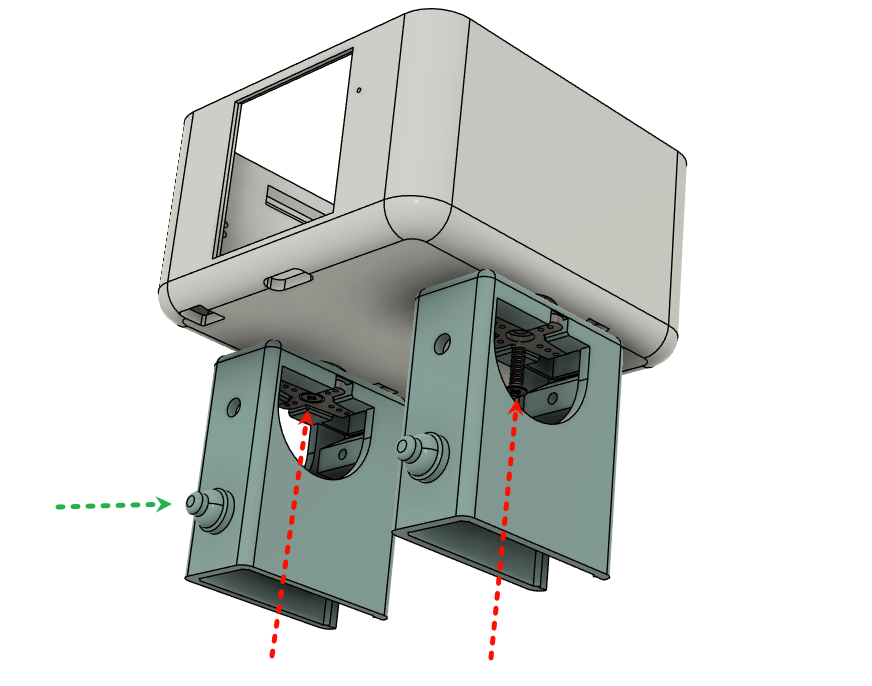 固定腿部并拧紧螺丝
固定腿部并拧紧螺丝Step 4 — 脚部组装
使用单臂摇臂,垂直朝上安装,拧紧螺丝
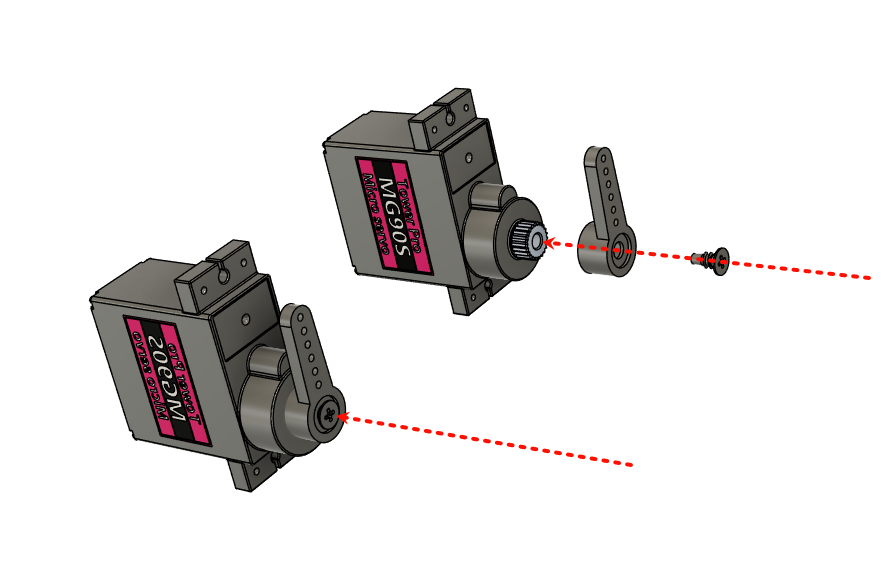 固定脚部舵机摇臂
固定脚部舵机摇臂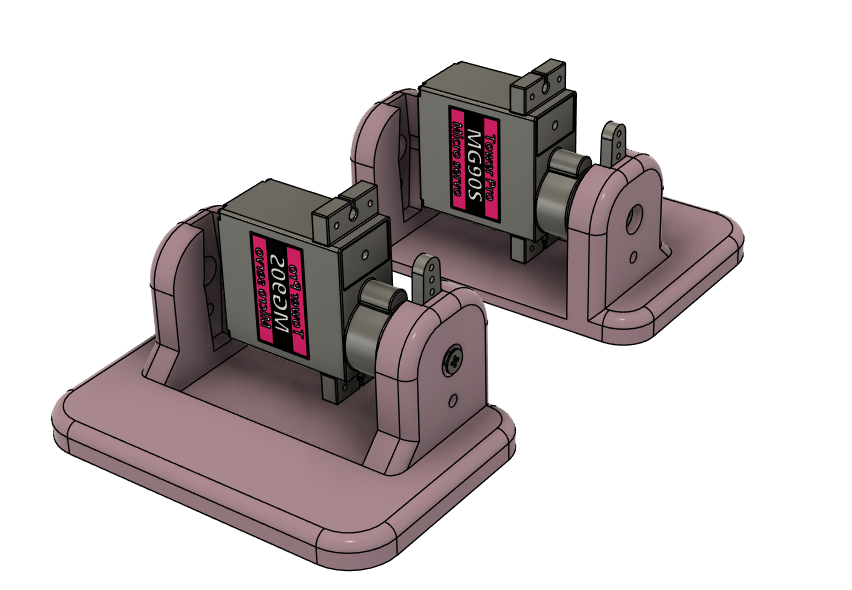 固定脚部
固定脚部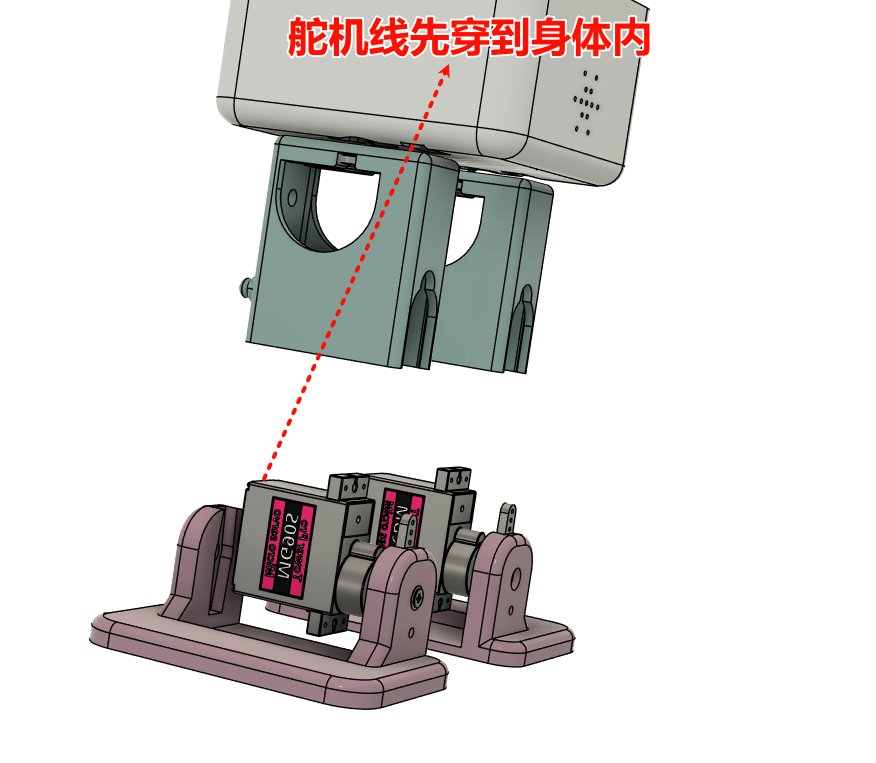 脚部舵机线穿到身体
脚部舵机线穿到身体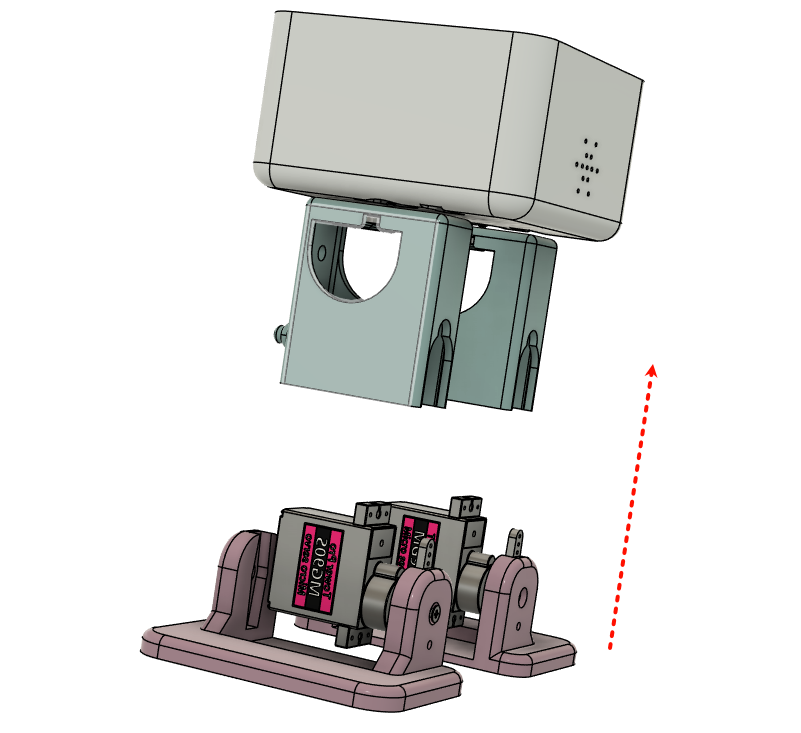 脚部安装
脚部安装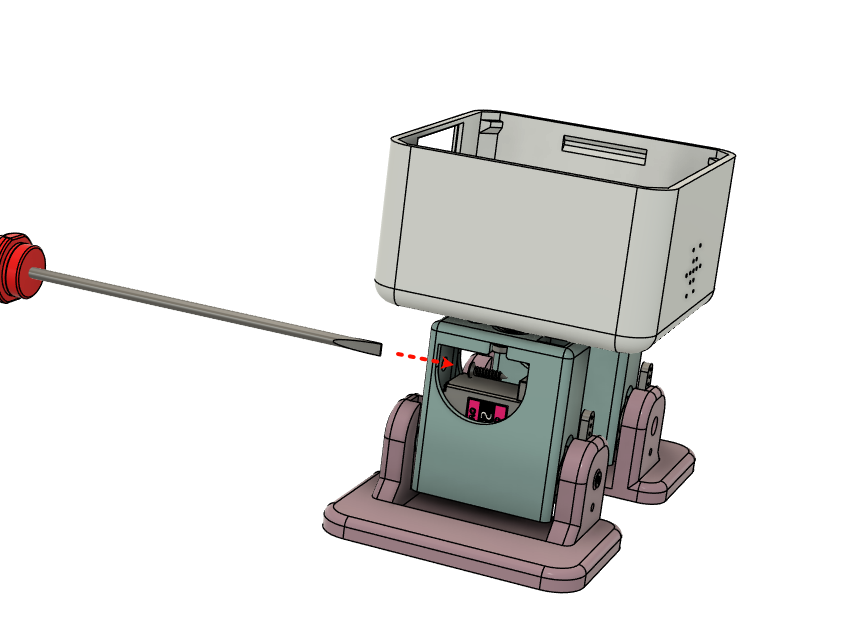 脚部舵机固定螺丝
脚部舵机固定螺丝Step 5 — 电路板安装
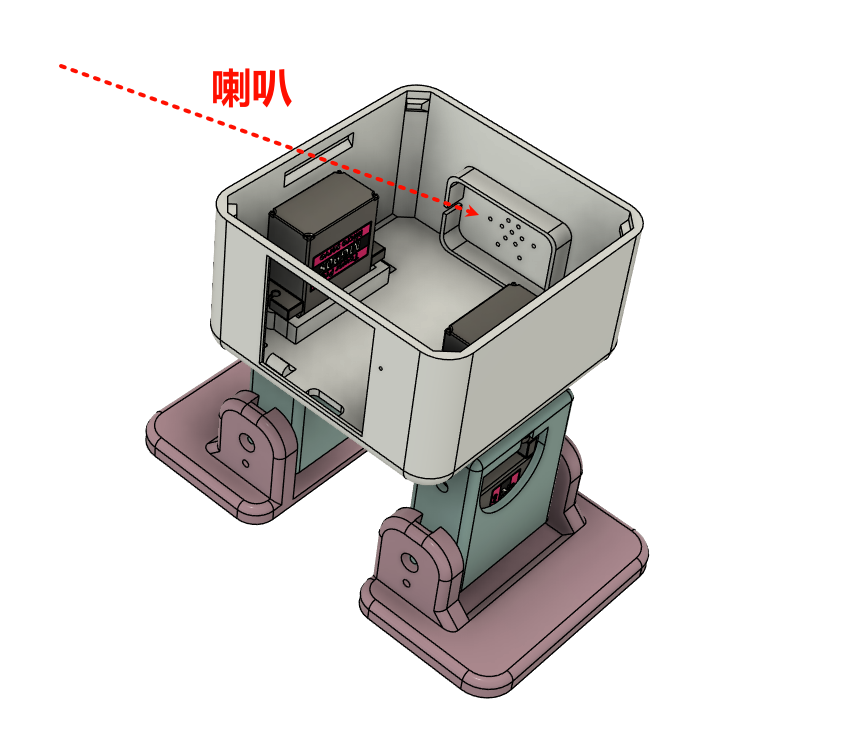 固定喇叭(有线的开槽)
固定喇叭(有线的开槽)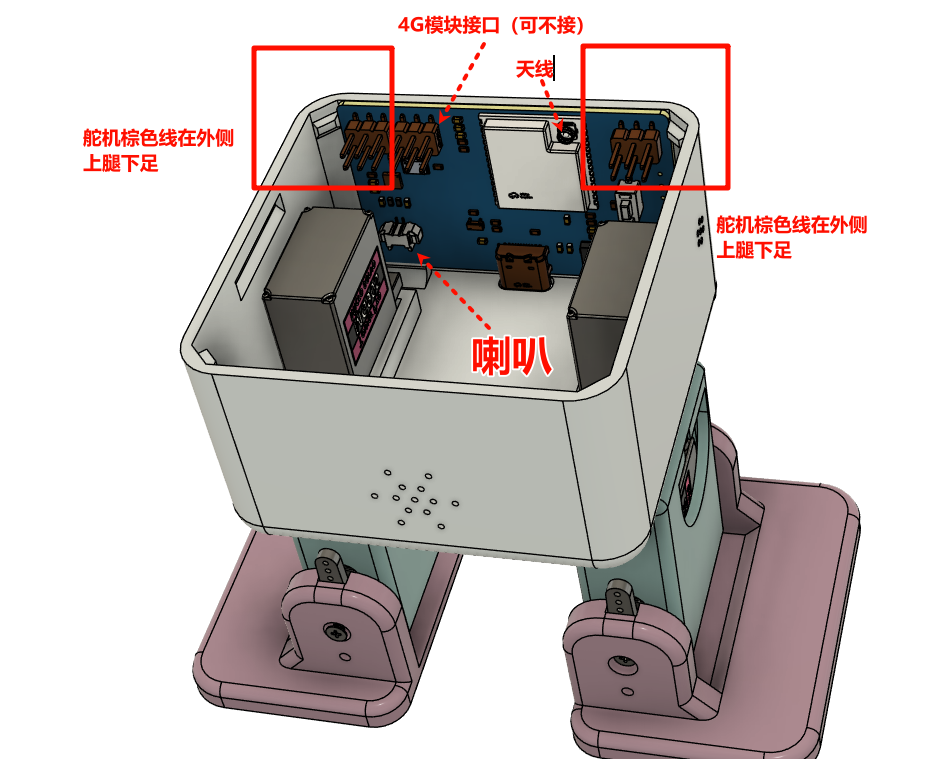 安装好舵机线、喇叭、电池、天线
安装好舵机线、喇叭、电池、天线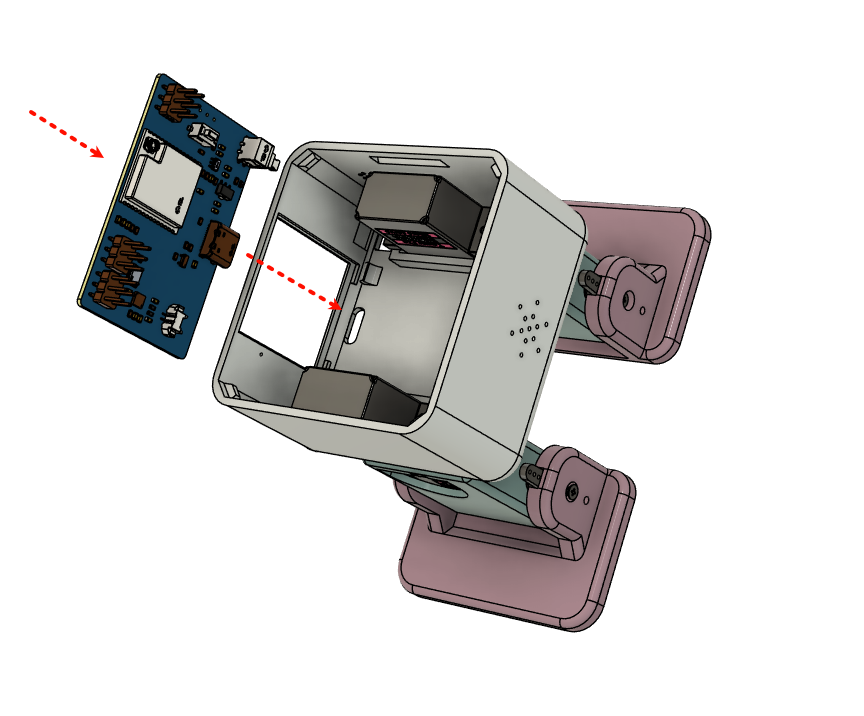 安装主板
安装主板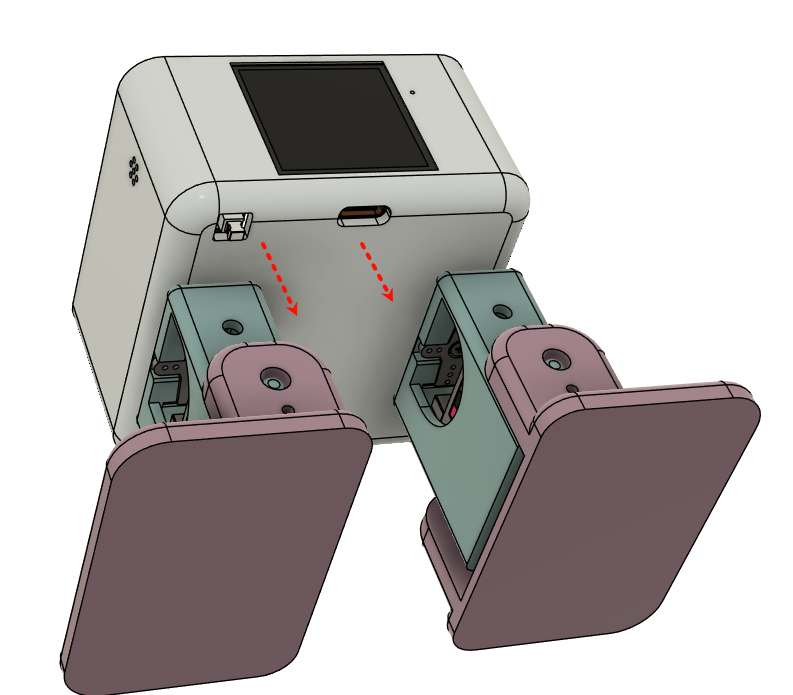 确保屏幕、Type-C充电口和开关到位
确保屏幕、Type-C充电口和开关到位Step 6 — 上盖安装
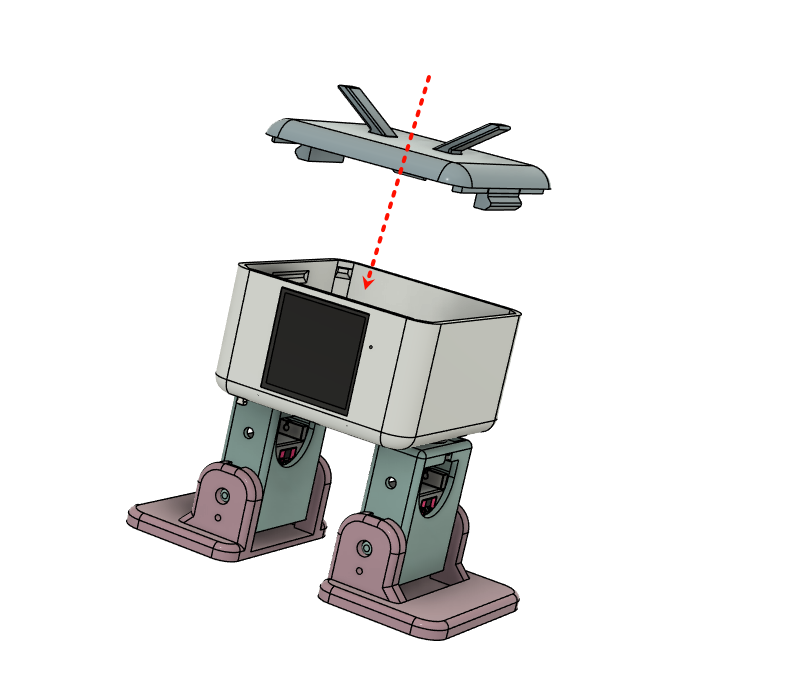 上盖前侧突起压紧电路板
上盖前侧突起压紧电路板注意事项
- 小心操作避免损坏零部件
- 螺丝拧紧但不要过度用力
- 注意舵机安装方向
程序烧录
源代码
ESP32+AI版源码
小智ESP32 AI机器人源码 ►
Wi-Fi+语音识别+AI对话,适合开发定制
原版Arduino源码
Otto DIY Arduino源码 ►
基础运动+表情+声音,适合Arduino版
固件下载
下载最新固件即可,兼容所有版本电路板。烧录前确保电池已安装!!!
| 版本 | 日期 | 更新内容 | 下载 |
|---|---|---|---|
| v2.0.5 | 2025-12-8 | 电量下限更新 | 下载 ► |
| v2.0.4-2 | 2025-11-17 | 微信小程序控制/校准/自定义 | 下载 ► |
| v2.0.4 | 2025-10-31 | 小智2.0.4+固定动作+AI编程动作 | 下载 ► |
| v1.4.4 | 2025-6-13 | 初始位置校准 | 下载 ► |
| v1.3.1 | 2025-5-27 | 任务优先级+修复"抽筋"bug | 下载 ► |
微信小程序
v2.0.4-2起支持微信小程序控制、校准和自定义:
 微信小程序二维码
微信小程序二维码烧录工具
- Windows:ESP32 Flash Download Tool
- Linux/Mac/Windows:
pip install esptool
烧录步骤
- 1. 下载最新固件(.bin文件)
- 2. 安装烧录工具
- 3. USB连接机器人到电脑(首次烧录需按住BOOT按钮再开开关!!!)
- 4. 选择COM端口,设置波特率921600、烧录地址0x0
- 5. 点击"开始"烧录
- 6. 烧录完成后重启主板!!!
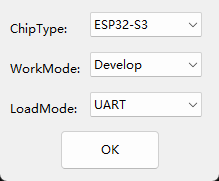 选择ESP32S3和串口
选择ESP32S3和串口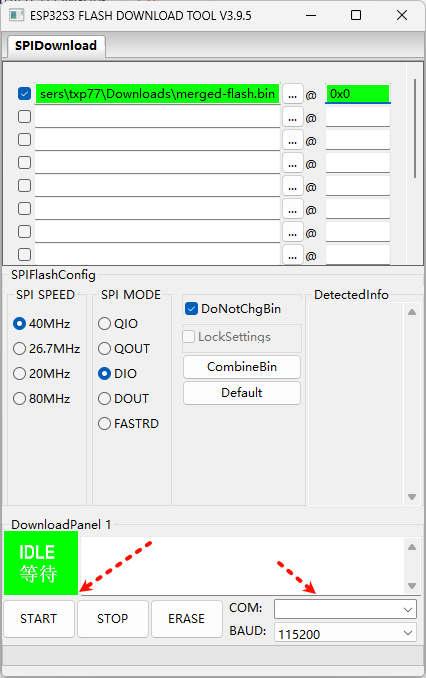 选择固件、COM端口、开始下载
选择固件、COM端口、开始下载合并固件命令(开发者)
鸣谢开源项目
使用说明
Wi-Fi配网
换新网络环境时需重新配网:
- 1. 打开电源 → 等待热点出现,名称:
xiaozhi-XXXX - 2. 手机连接热点(无密码) → 自动跳转网页
- 3. 输入家庭Wi-Fi名称和密码 → 提交完成
绑定小智后台
- 1. 访问 xiaozhi.me → 注册登录
- 2. 添加绑定设备 → 配置角色、大模型、语音
- 3. 重启设备生效
电量显示可能不够精准,请及时充电。电源与充电口位于身体下方。
示例角色设定(可复制粘贴到小智后台)
唤醒与指令
唤醒词:"Hi 喵喵" / "你好小智" / "你好涂鸦"(可在源码中修改)
- 基本控制:调高音量 / 调亮屏幕 / 切换暗黑/明亮模式
- 动作控制:向前走 / 向前走5步 / 快速向前 / 跳个舞吧 / 做个太空步速度快一点 / 随机做几个动作 / 停下来吧 / 挥挥手
- 娱乐互动:唱个歌吧 / 换个悲伤的表情
动作执行时仍可接收语音指令。噪音大时提高音量。指令由AI后台创建并下发。
MCP技能服务
通过MCP服务让AI接入更多能力,例如:搜黄金价格 / 搜新闻 / 教做菜 / 讲脱口秀
接入方法:打开 mcp.shanmaotech.cn → 复制小智AI MCP端点链接 → 粘贴至对应MCP服务 → 点击启动
MCP动作工具参数
所有动作均可通过MCP工具精确调用,参数说明:
- steps:步数/次数(1-100),数值越大持续时间越长
- speed:速度(500-1500),数值越小越快 — 低速1200-1500/中速900-1200/高速500-800
- direction:移动1=左/前进,-1=右/后退;手部1=左手,-1=右手,0=双手
- amount/arm_swing:幅度(0-170度),0=不摆动
基础移动
| 工具 | 描述 | 参数 |
|---|---|---|
| otto.walk_forward | 行走 | steps / speed / direction / arm_swing |
| otto.turn_left | 转身 | steps / speed / direction / arm_swing |
| otto.jump | 跳跃 | steps / speed |
特殊动作
| 工具 | 描述 | 参数 |
|---|---|---|
| otto.swing | 摇摆 | steps / speed / amount |
| otto.moonwalk | 太空步 | steps / speed / direction / amount |
| otto.bend | 弯曲 | steps / speed / direction |
| otto.shake_leg | 摇腿 | steps / speed / direction |
| otto.updown | 上下运动 | steps / speed / amount |
| otto.whirlwind_leg | 旋风腿 | steps / speed(建议300) / amplitude(20-40度) |
手部动作 *
| 工具 | 描述 | 参数 |
|---|---|---|
| otto.hands_up | 举手 | speed / direction |
| otto.hands_down | 放手 | speed / direction |
| otto.hand_wave | 挥手 | direction |
| otto.windmill | 大风车 | steps / speed(300-2000ms) / amplitude(50-90度) |
| otto.takeoff | 起飞 | steps / speed(200-600ms) / amplitude(20-60度) |
| otto.fitness | 健身 | steps / speed / amplitude(10-50度) |
| otto.greeting | 打招呼 | direction / steps |
| otto.shy | 害羞 | direction / steps |
| otto.radio_calisthenics | 广播体操 | 无参数 |
| otto.magic_circle | 爱的魔力转圈圈 | 无参数 |
系统动作 + 工具
| 工具 | 描述 | 参数 |
|---|---|---|
| otto.sit | 坐下 | 无 |
| otto.showcase | 展示动作 | 无 |
| otto.home | 复位 | 无 |
| otto.stop | 停止所有动作 | 无 |
| otto.servo_sequences | 舵机序列自编程 | sequence: JSON序列对象 |
| otto.get_status | 获取状态 | 返回 "moving" / "idle" |
| otto.get_trims | 获取微调 | 返回JSON微调值 |
| otto.set_trim | 设置微调 | servo_type / trim_value(-50~50度) |
| battery.get_level | 电池状态 | 返回电量百分比+充电状态 |
* 手部动作需配置手部舵机。动作完成后自动归位(home),支持队列连续执行。
常见问题
硬件
软件
组装
网络
其他
获取更多帮助
- GitHub Issues
- QQ群:闪猫科技交流群4群
- 联系技术支持
社区二次开发
展示社区创客们的二次开发作品,欢迎大家投稿分享你的创意与作品。
作品招募中
如果你基于闪猫侠机器人做了有趣的二次开发,欢迎投稿展示你的作品!